Устройство и принцип действия синхронного двигателя
Содержание:
- Конструкция мотора
- Конструкции и типы синхронного электродвигателя с постоянными магнитами
- Производители электродвигателей
- Принцип действия синхронного двигателя
- 7.3.1. Усройство и принцип действия синхронного электродвигателя.
- Система управления
- Основные параметры электродвигателя
- Характеристики синхронного электродвигателя
- Синхронные двигатели: устройство и принцип действия
- Где применяются
- Принцип работы синхронного двигателя
- Устройство синхронного двигателя
Конструкция мотора
Устройство и принцип действия синхронных двигателей несложны.
Конструкция включает в себя такие элементы:
- Неподвижная часть – статор. На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
- Подвижная часть – ротор. На нем тоже имеется обмотка. При работе на нее подается напряжение.
Между ротором и статором имеется прослойка воздуха. Она обеспечивает нормальное функционирование двигателя и позволяет магнитному полю беспрепятственно воздействовать на элементы агрегата. В конструкции присутствуют подшипники, в которых вращается ротор, а также клеммная коробка, расположенная в верхней части мотора.
Конструкции и типы синхронного электродвигателя с постоянными магнитами
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Синхронный электродвигатель со встроенными постоянными магнитами
Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором — электродвигатели обращенного типа.
Конструкции синхронного двигателя с постоянными магнитами: слева — стандартная, справа обращенная.
Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
- По конструкции ротора синхронные двигатели делятся на:
- электродвигатели с явно выраженными полюсами;
- электродвигатели с неявно выраженными полюсами.
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.
Сечение роторов с разным отношением Ld/Lq. Черным обозначены магниты. На рисунке д, е представлены аксиально-расслоенные роторы, на рисунке в и з изображены роторы с барьерами.
- Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов(англ. SPMSM — surface permanent magnet synchronous motor);
- синхронный двигатель со встроенными (инкорпорированными) магнитами(англ. IPMSM — interior permanent magnet synchronous motor).
Ротор синхронного двигателя c поверхностной установкой постоянных магнитов
Ротор синхронного двигателя со встроенными магнитами
Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
- В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
- с распределенной обмоткой;
- с сосредоточенной обмоткой.
Статор электродвигателя с распределенной обмоткой
Статор электродвигателя с сосредоточенной обмоткой
Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3,…., k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток — невозможность влияния на форму кривой ЭДС .
Схема трехфазной распределенной обмотки
Схема трехфазной сосредоточенной обмотки
Форма обратной ЭДС электродвигателя может быть:
трапецеидальная;
синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора .
Производители электродвигателей
Российские производители электродвигателей
| Регион | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Краснодарский край | Армавирский электротехнический завод | |||||||||
| Свердловская область | Баранчинский электромеханический завод | |||||||||
| Владимир | Владимирский электромоторный завод | |||||||||
| Санкт-Петербург | ВНИТИ ЭМ | |||||||||
| Москва | ЗВИМосковский электромеханический завод имени Владимира Ильича | |||||||||
| Пермь | ИОЛЛА | |||||||||
| Республика Марий Эл | Красногорский завод «Электродвигатель» | |||||||||
| Воронеж | МЭЛ | |||||||||
| Новочеркасск | Новочеркасский электровозостроительный завод | |||||||||
| Санкт-Петербург | НПО «Электрические машины» | |||||||||
| Томская область | НПО Сибэлектромотор | |||||||||
| Новосибирск | НПО Элсиб | |||||||||
| Удмуртская республика | Сарапульский электрогенераторный завод | |||||||||
| Киров | Электромашиностроительный завод Лепсе | |||||||||
| Санкт-Петербург | Ленинградский электромашиностроительный завод | |||||||||
| Псков | Псковский электромашиностроительный завод | |||||||||
| Ярославль | Ярославский электромашиностроительный завод |
Аббревиатура:
- АДКР —
- АДФР —
- СДОВ — синхронный двигатель с обмоткой возбуждения
- СДПМ — синхронный двигатель с постоянными магнитами
- СРД — синхронный реактивный двигатель
- СГД — синхронный гистерезисный двигатель
- УД — универсальный двигатель
- КДПТ — коллекторный двигатель постоянного тока
- КДПТ ОВ —
- КДПТ ПМ —
Производители электродвигателей ближнего зарубежья
| Страна | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Беларусь | Могилевский завод «Электродвигатель» | |||||||||
| Беларусь | Полесьеэлектромаш | |||||||||
| Украина | Харьковский электротехнический завод «Укрэлектромаш» | |||||||||
| Молдова | Электромаш | |||||||||
| Украина | Электромашина | |||||||||
| Украина | Электромотор | |||||||||
| Украина | Электротяжмаш |
Производители электродвигателей дальнего зарубежья
| Страна | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Швейцария | ABB Limited | |||||||||
| США | Allied Motion Technologies Inc. | |||||||||
| США | Ametek Inc. | |||||||||
| США | Anaheim automation | |||||||||
| США | Arc System Inc. | |||||||||
| Германия | Baumueller | |||||||||
| Словения | Domel | |||||||||
| США | Emerson Electric Corporation | |||||||||
| США | General Electric | |||||||||
| США | Johnson Electric Holdings Limited | |||||||||
| Германия | Liebherr | |||||||||
| Швейцария | Maxon motor | |||||||||
| Япония | Nidec Corporation | |||||||||
| Германия | Nord | |||||||||
| США | Regal Beloit Corporation | |||||||||
| Германия | Rexroth Bosch Group | |||||||||
| Германия | Siemens AG | |||||||||
| Бразилия | WEG |
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
И.В.Савельев. Курс общей физики, том I. Механика, колебания и волны, молекулярная физика.-М.:Наука, 1970.
ГОСТ 29322-92 (МЭК 38-83) Стандартные напряжения.
ГОСТ 16264.0-85 Электродвигатели малой мощности
А.И.Вольдек, В.В.Попов. Электрические машины. Машины переменного тока: Учебник для вузов.- СПб.: Питер, 2007.
Paul Waide, Conrad U. Brunner. Energy-Efficiency Policy Opportunities for Electric Motor-Driven Systems. International Energy Agency Working Paper, Energy Efficiency Series.: Paris, 2011.
Dr. J. Merwerth. The hybrid-synchronous machine of the new BMW i3 & i8 challenges with electric traction drives for vehicles. BMW Group, Workshop University Lund: Lund, 2014.
Принцип действия синхронного двигателя
Синхронная машина обратима и может работать как в режиме генератора, так и в режиме двигателя.
Конструктивно синхронный двигатель ничем не отличается от синхронного генератора.
Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с магнитным полем полюсов ротора.
При работе синхронной машины в режиме двигателя к статору подводят трехфазный переменный ток, а к обмотке возбуждения ротора — постоянный ток.
Трехфазный переменный ток создает в обмотке статора вращающееся магнитное поле, которое вращается в пространстве со скоростью
где f— частота переменного тока(гц);
р — число пар полюсов в машине.
Представим себе магнитное поле статора в виде круга с явно выраженными полюсами на нем, вращающегося со скоростью п1об/мин. Эти полюса магнитными силовыми линиями связываются с полюсами ротора противоположной полярности (рис. 212).
Вращающееся магнитное поле увлекает за собой полюса ротора и заставляет их вращаться с такой же скоростью. Скорость вращения ротора, равную скорости вращающегося магнитного поля, называют синхронной скоростью. При нагрузке ротор синхронного двигателя отстает на некоторый угол в от вращающегося магнитного поля, причем с увеличением нагрузки угол в увеличивается (рис. 212,б
Зависимость вращающего момента синхронной машины от угла в представлена на рисунке 213. Кривая имеет вид
синусоиды. При поминальной мощности двигателя угол Q = 20—30°, при этом перегрузочная способность двигателя равна—
Вращающий момент синхронного двигателя пропорционален приложенному напряжению. Ротор вращается с синхронной скоростью, не зависящей от нагрузки, а при увеличении нагрузки изменяется только угол в.
При вращении ротора магнитный поток полюсов Ф пересекает витки обмотки статора и индуктирует в них э. д. с. Е. Согласно уравнению равновесия э. д. c. приложенное к двигателю напряжение сети Uс уравновешивается суммой обратных э. д. с. двигателя сумм ЕДВ. На основании этого уравнения нарисуем векторную диаграмму синхронного двигателя (рис. 214). Вектор тока I откладываем вертикально. Под углом ф в сторону опережения откладываем вектор напряжения сети Uc. В фазе с вектором тока откладываем векторы магнитного потока якоряФя и потока рассеяния Фрс. каждый из которых индуктирует соответствующие э. д. с.Ея и ЕРС. отстающие от вектора магнитного потока на 90°. Откладываем на векторной диаграмме векторЕя и пристраиваем к нему вектор э. д. с. рассеянияEрс, сумма этих э. д. с. равна падению напряжения на синхронном индуктивном сопротивлении двигателя Хсх
Так как из уравнения равновесия э. д. с. известно, что напряжение сети UС уравновешивается суммой э. д. с. двигателя, то откладываем векторОА, равный и противоположный по направлению вектору напряжения сетиUС, который и будет представлять сумму э. д. с. двигателя суммЕДВ. Вектор противоэ. д. с. двигателяЕ определится как третья сторона треугольникаОАВ, где известны стороныОА иОВ. Из этой векторной диаграммы видно, что
)
Вектор напряжения сетиUc изобразим состоящим из двух составляющих, каждая из которых уравновешивает соответствующую обратную э. д. с. В данном случае составляющая —Е уравновешивает э. д. с.Е, а составляющаяIхсх уравновешивает э. д. с.Ея иЕрс.
7.3.1. Усройство и принцип действия синхронного электродвигателя.
Характерный признак синхронного
двигателя – вращение ротора с
синхронной частотой n1
=
ƒ160
/pнезависимо от нагрузки на валу. Поэтому
синхронные двигатели используют в
системах автоматики для привода
механизмов, требующих строго стабильной
частоты вращения.
Синхронный двигатель, как и асинхронный,
состоит из неподвижного статора и
вращающегося ротора, разделенных
воздушным зазором (у синхронных двигателей
этот зазор несколько больше). Существуют
конструктивные разновидности исполнения
синхронных двигателей малой мощности,
отличающиеся в основном устройством
ротора: явнополюсные с электромагнитным
возбуждением, явнополюсные с возбуждением
постоянными магнитами, явнополюсные
реактивные (с невозбужден-ным ротором),
неявнополюсные гистерезисные.
Рассмотрим синхронные явнополюсные
двигатели с
электромагнитным возбуждением.
Эти двигатели изготавливаются обычно
мощностью в несколько киловатт и более
и поэтому в устройствах автоматики
широкого применения не получили.
Однако основные положения теории этих
двигателей используются при изучении
синхронных двигателей малой мощности
с возбуждением постоянными магнитами
и других типов.
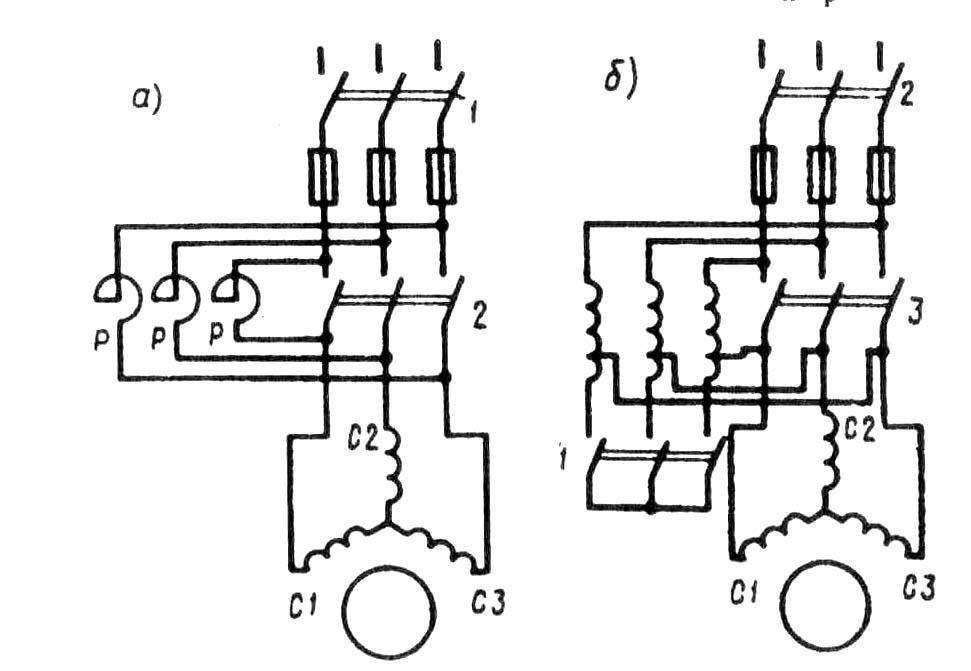
Для изучения принципа действия синхронного
явнополюсного двигателя с электромагнитным
возбуждением используем модель,
представляющую собой две разделенные
воздушным зазором магнитные системы
с явно выраженными полюсами – внешнюю
1и внутреннюю
2(рис.
6). Если внешняя система полюсов неподвижна,
то благодаря силам магнитного притяжения
внутренняя система полюсов (ротор)
расположится так, что ее полюсы будут
находиться под полюсами внешней системы
противоположной полярности. При этом
силы
FMмагнитного притяжения, действу-ющие
на внутреннюю систему, не будут
создавать электромагнитного момента
(рис. 7,а), так как они направлены
радиально (по оси полюсов).
Если внешнюю систему полюсов вращать
с небольшой частотой n1, то в
начальный момент времени эта система
сместится относительно внутренней
на некоторый угол θ (рис. 7,б). При
этом вектор силы магнитного притяженияFMтакже повернется относительно оси
полюса ротора. Теперь эта сила состоит
из двух составляющих:FM=
Fn
+ Ft
причем нормальная составляющая
Fnнаправлена по оси полюса рото-
— 4 —
ра,
а тангенциальная
Ft–
перпендикулярно оси полюса. Совокупность
составляющих
Ftдействующих
на все полюсы ротора, создает на роторе
электромагнитный вращающий моментМ,
приводящий ротор во вращение с
синхронной частотойn1, т. е.
синхронно вращению внешней системе
полюсов.
Рис.
6. Упрощенная модель синхронного
двигателя:
Рис. 7. Возникновение
электромагнитного
а
– внешняя магнитная система;
момента на роторе синхронного
б
– внутренняя магнитная система.
двигателя.
Трехфазный синхронный двигатель
отличается от рассмотренной модели
тем, что в нем вместо внешней системы
полюсов имеется неявнополюсный
статор с распределенной трехфазной
обмоткой, аналогичный статору
асинхронного трехфазного двигателя.
Ротор синхронного двигателя – явнополюсной
конструкции с электромагнитным
возбуждением. При этом на полюсах ротора
2 располагают
полюсные
катушки
3(рис. 8), которые при последовательном
соединении образуют обмотку возбуждения
(ОВ).
При подключении ОВ к источнику постоянного
тока возникает магнитный поток возбуждения
ФВ, силовые линии которого
сцеплены с обмоткой статора1.
При включении обмотки статора в
трехфазную сеть создается вращающееся
с синхронной частотойn1магнитное поле с таким же числом
полюсов, как на роторе. Благодаря
взаимодействию полей статора и ротора
возникает электромагнитный момент,
вращающий ротор ссин-хронной
частотой. В результате электрическая
энергия сети преобразуется в механическую
энергию вращения.
Предположим, что ротор двигателя враща-
Рис.
8.
Магнитная система явнополюсногоется с частотой, отличающейся
от частоты
синхронного
двигателя (2р
= 4): вращения
поля статора, тогда в некоторые
1
– обмотка статора; 2
– полюса ротора; моменты
времени возбужденные полюса ро-
3
– полюсные катушки. тора
окажутся под одноименными полюсами
поля статора, возникнут силы магнитного
от-
— 5 —
талкивания
Суммарный электромагнитный момент
станет равным нулю и ротор остановится.
На рис. 9,
апоказана конструкция ротора синхронного
двигателя с явно выраженными полюсами.
Система управления
Если электромеханическая часть состоит преимущественно из трех компонентов, в числе которых ротор, статор и несущая конструкция в виде корпуса, то управляющая инфраструктура более сегментирована – количество элементов может достигать нескольких десятков. Другое дело, что их можно поделить на виды. В единственном числе будет представлен только инвертор. Он отвечает за функции коммутации, осуществляя подключение и переключение фаз. Основные же задачи контроля с подачей сигналов выполняют датчики. Главным из них является детектор положения ротора. Кроме этого, в состав управляющего блока вводится и система регуляции сигналов. Это узел с ключами, посредством которого реализуется связь датчиков и электромеханической начинки.
Информацию о позиции ротора обрабатывает микропроцессор. Внешне интерфейс этого блока представляет собой панель управления. На приеме она работает с сигналами широтно-импульсной модуляции (ШИМ-сигнал). Если предусматривается подача низковольтных сигналов, то в управляющем блоке устанавливается и транзисторный мост. Он преобразует сигнал в силовое напряжение, которое в дальнейшем подается на электродвигатель. Наличие датчиков с системой обработки импульсов как раз и отличает управление вентильным двигателем от средств контроля щеточно-коллекторных агрегатов. Другое дело, что возможность внедрения электронной аппаратуры с датчиками допускается и в коллекторных машинах наряду с механическими системами управления.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.
Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.
Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.
Синхронные двигатели: устройство и принцип действия
Основные части синхронного двигателя – это якорь (статор, неподвижная часть) и индуктор (ротор), разделенные воздушной прослойкой. В пазы статора закладывают трехфазную распределенную обмотку – обычно она соединяется «звездой».
Рис. 2 Схема синхронного двигателя
С началом работы двигателя тока, подаваемые в якорь, создают вращение магнитного поля, которое пересекает поле индуктора, что в результате взаимодействия двух полей переходит в энергию. Поле якоря чаще называют иначе – поле реакции якоря. В генераторах такое получают при помощи индуктора. Входящие в состав индуктора электромагниты постоянного тока принято называть полюсами. При этом индукторы во всех синхронных двигателях могут исполняться по двум схемам – явнополюсной и неявнополюсной, различающиеся между собой расположением полюсов. Чтобы уменьшить значение магнитного сопротивления и тем самым улучшить условия для прохождения магнитного потока, применяют ферромагнитные сердечники. Они располагаются в статоре и роторе, для их изготовления используют специальную марку стали – электротехническую, отличающую высоким содержанием кремния – это позволяет уменьшить вихревые токи и повысить электрическое сопротивление стали.
Рис. 3. Магнитные поля в синхронном двигателе
В основу работы синхронного двигателя положен принцип взаимного влияния полюсов индуктора и магнитного поля, индуцируемого якорем. При запуске осуществляется разгон двигателя до частоты, которая близка по своему значению частоте, с которой происходит в зазоре вращение магнитного поля. Только при выполнении этого условия двигатель переходит в функционирование в синхронном режиме. В данный момент пересекаются магнитные поля, инициируемые индуктором и ротором. Этот момент в технической литературе принято называть входом в синхронизацию.
Работа синхронного двигателя наглядно представлена на видео:
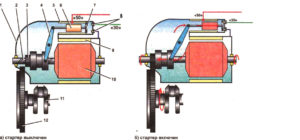
Длительное время в качестве разгонного двигателя использовался стандартный синхронный двигатель, который был механически соединен с синхронным. Благодаря этому, ротор на синхронном двигателе механически разгонялся до подсинхронной скорости, а затем уже самостоятельно, за счет взаимодействия электромагнитных полей, втягивался в синхронизм. Обычно при подборе мощности пускового двигателя исходили из соотношения 10-15% от номинальной мощности разгоняемого двигателя. Такого запаса мощности вполне хватало запустить синхронный двигатель не только в холостую, но даже и при незначительной нагрузке на валу.
Рис. 4 Синхронный двигатель (1) с внешним разгонным (2) двигателем
Такой способ разгона усложняет и существенно удорожает общую стоимость, поэтому в современных двигателях от него отказались в пользу разгона в состоянии асинхронного режима. В этом случае с помощью реостата (короткозамкнутым путем) обмотки индуктора замыкают, как в асинхронном двигателе. Чтобы провести запуск двигателя в таком режиме, на ротор устанавливают короткозамкнутую обмотку, выступающую одновременно и как успокоительная обмотка, устраняющая во время проведения синхронизации раскачивание ротора. В момент, когда скорость вращения достигнет требуемого номинального значения, в индуктор будет подан постоянный ток. Но для двигателей, в которых стоят постоянные магниты, все равно придется для разгона использовать внешние двигатели.
В криогенных синхронных машинах используется так называемая обращенная конструкция, при которой размещение индуктора и якоря выполнено наоборот, т.е. индуктор расположен на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения состоят из материалов, обладающими свойствами сверхпроводимости.
Где применяются
Асинхронные двигатели активно используются во многих отраслях промышленности и сельского хозяйства. Они потребляют примерно 70% всей энергии, предназначенной для преобразования электричества во вращательное или поступательное движение. Асинхронные двигатели зарекомендовали себя наиболее эффективными в качестве электрической тяги, без которой не обходятся многие технологические операции.
Асинхронные двигатели обладают множеством положительных качеств. Простая конструкция позволяет изготавливать наиболее дешевые и надежные устройства. Минимальные расходы по эксплуатации обеспечиваются отсутствием скользящего узла токосъема, что одновременно повышает и надежность агрегата.
Данный тип электродвигателей может быть трехфазным или однофазным, в зависимости от количества питающих фаз. В случае необходимости и при соблюдении определенных условий, трехфазный агрегат может питаться и работать от однофазной сети. Эти устройства применяются не только в промышленности, но и в бытовых условиях, а также на садовых участках или домашних мастерских. Однофазные двигатели обеспечивают работу и вращение вентиляторов, стиральных машин, небольших станков, водяных насосов и электроинструмента.
Для нормального действия асинхронного агрегата необходимо выбирать наиболее рациональную схему управления. Трехфазный двигатель будет работать в однофазном режиме при условии правильного расчета конденсаторов, выбора типа и сечения проводов, аппаратуры защиты и управления.
Принцип работы синхронного двигателя
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую.
По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля. Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети.
Ниже дана формула синхронной скорости:
Ns = 120F/p
Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.